Robot téléguidé
Objectif et Travail à faire
Obectif
L'objectif est de faire des combats de robot. Chaque robot à un pique devant et un ballon derrière. L'objectif est d'exploser le ballon de son ennemie

Travail à Réaliser
Taches à réaliser
- Assembler les robots
- Mettre un premier programme simple (tourner 3s, avancer 5s...)
- Mettre un programme pour le téléguider
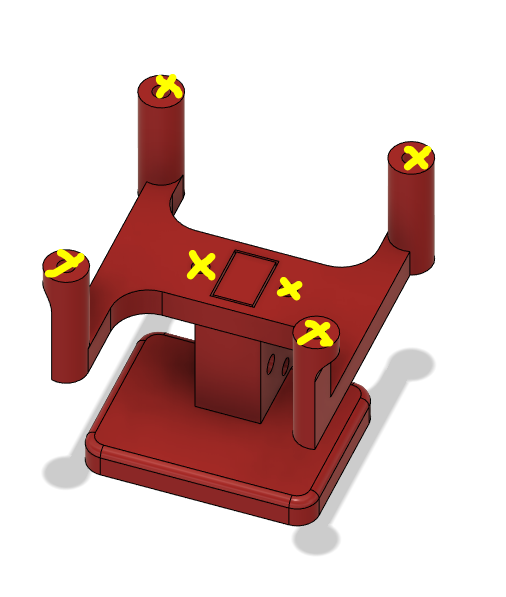
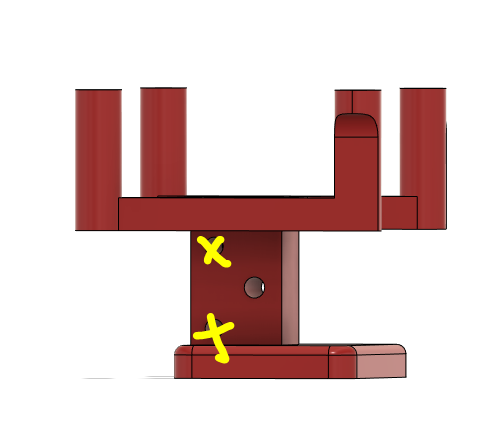
- Concevoir une pièce pour l'attache de ballon et une pièce pour le support de pique
Amélioration
- Pique mobile grâce à un Servo moteur
- Amélioration de l'interface
- Capteur pour détecter quand le ballon et percé et ainsi stopper le robot
Logiciel utilisé
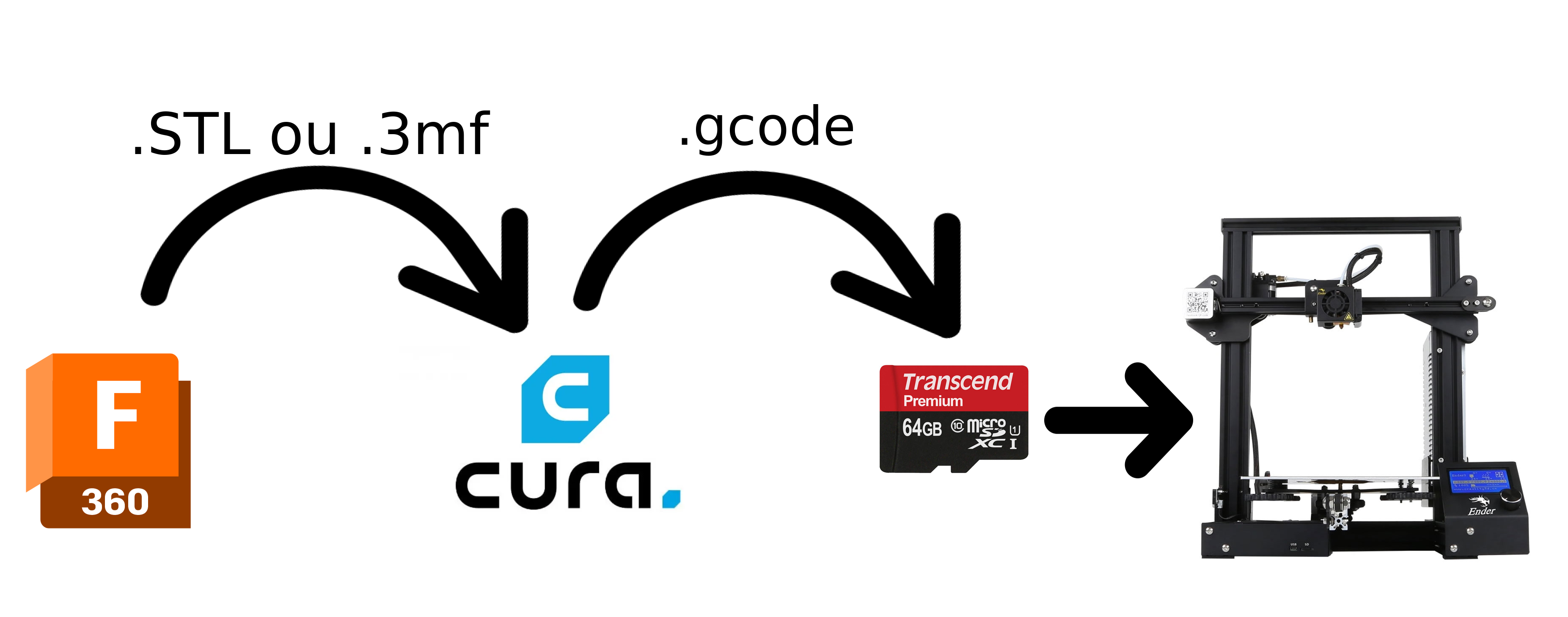
Fusion 360
Ce logiciel permet de créer des pièces en 3D sur un ordinateur pour pouvoir ensuite les fabriquer (impression 3D, CNC, découpe laser...)
https://wiki.robotronik.fr/books/fusion-360
Cura
Ce logiciel permet de préparer des pièces pour l'impression 3D avant de les sauvegarder dans la carte micro SD
Visual Studio Code + extension platformIO
Ce logiciel permet de programmer les robots
Assemblage des Robots
1) Collage
Coller les 2 parties au pistolet à colle chaude

2) Insert 3D
Mettre les 12 inserts 3D avec un fer a souder à 250°
Comment mettre des inserts : https://www.youtube.com/shorts/bA56yQtnpVg

3) Couper l'axes des moteurs
Couper l'axes des moteurs du coté avec bout de plastique qui dépasse :

4) visser tout les éléments du robot
Attention a prendre des vis ni trop courte ni trop longue
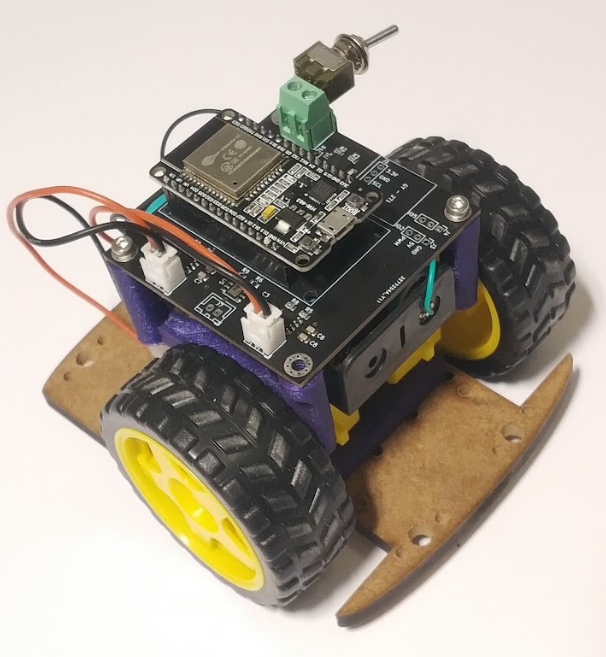
5) câbler les 2 moteurs
Souder les câbles coté moteurs et sertir les cosses coté circuit
Pour sertir les cosses : https://www.youtube.com/shorts/_zl28E2urEU
Le sertissage de ces cosses est vraiment délicat
6) câbler la batteries
Il faudra souder un câble sur le support de batteries pour avoir la tension milieu
Pour le connecteur charge, utiliser un multimètre en mode "bip bip" (où bipmètre pour les intimes) pour trouver sur quel borne mettre le + et le - . Le - doit être à l'extérieur du connecteur et le + à l'intérieur

Electronique
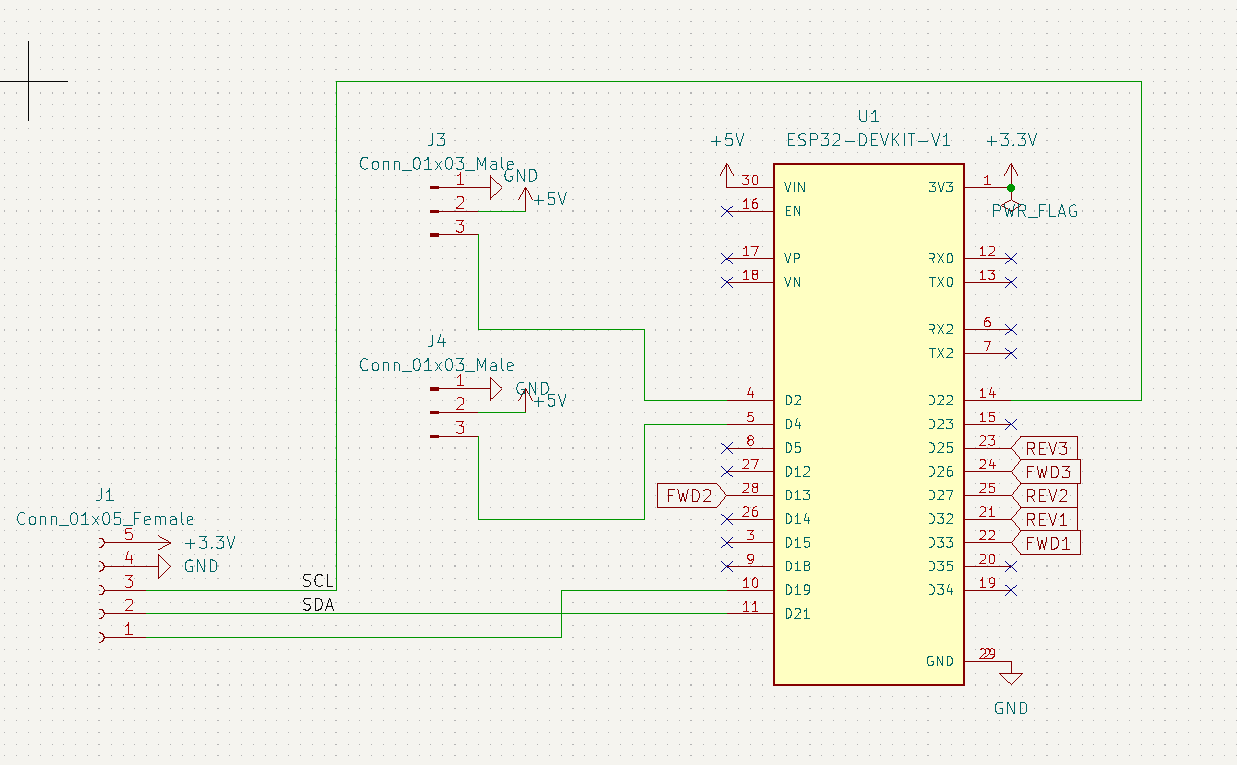
Schémas électronique de la Carte du Robot :
Microcontrôleur :
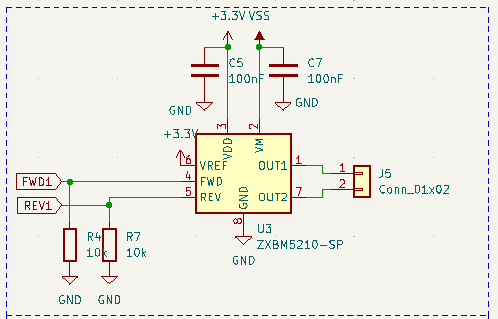
Driver Moteur :
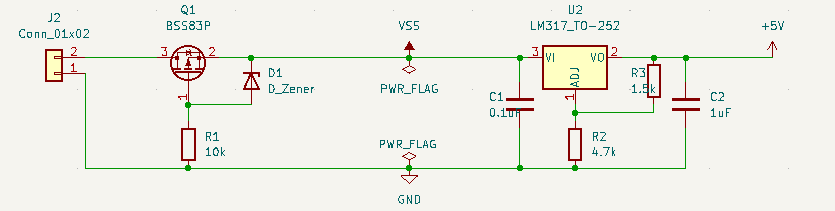
Alimentation :
Placement Routage :
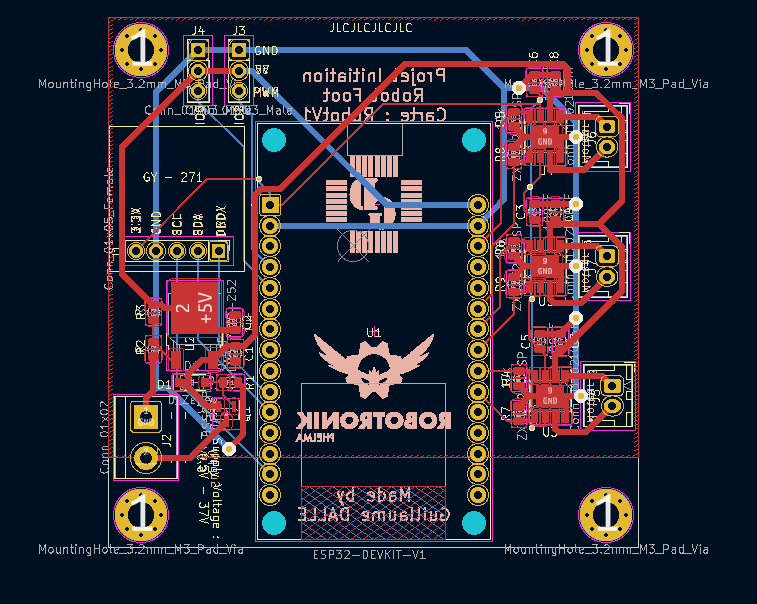
Vue 3D :
