# Assemblage des Robots
#### 1) Collage
Coller les 2 parties au pistolet à colle chaude
[](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/l4jimage.png)
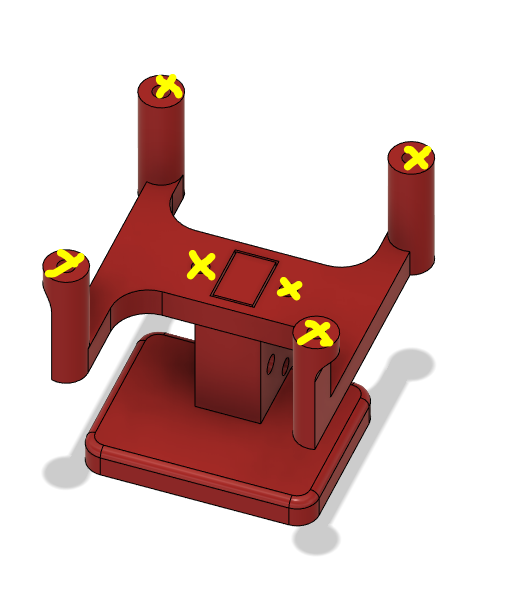
#### 2) Insert 3D
Mettre les 12 inserts 3D avec un fer a souder à 250°
Comment mettre des inserts : [https://www.youtube.com/shorts/bA56yQtnpVg](https://www.youtube.com/shorts/bA56yQtnpVg)
[](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/RPiimage.png)[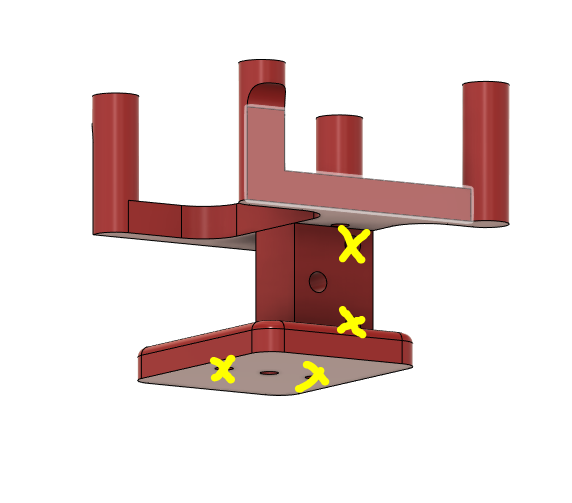](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/X33image.png)[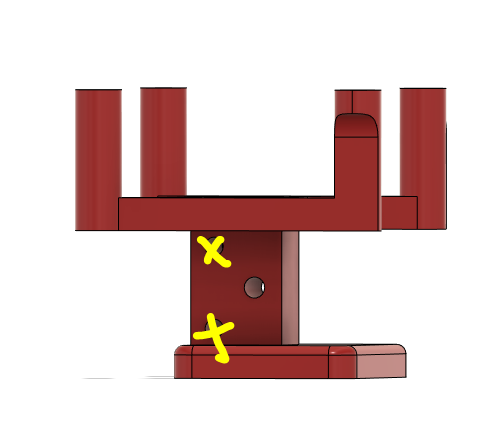](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/CWCimage.png)
##### 3) Couper l'axes des moteurs
Couper l'axes des moteurs du coté avec bout de plastique qui dépasse :
[](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/oEfimage.png)
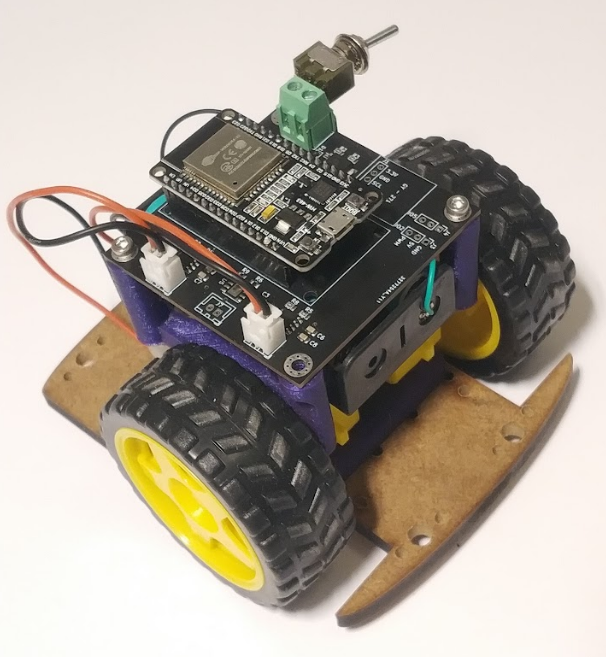
##### 4) visser tout les éléments du robot
Attention a prendre des vis ni trop courte ni trop longue
[](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/D3kimage.png)
##### 5) câbler les 2 moteurs
Souder les câbles coté moteurs et sertir les cosses coté circuit
[Pour sertir les cosses : https://www.youtube.com/shorts/\_zl28E2urEU](https://www.youtube.com/shorts/_zl28E2urEU)
Le sertissage de ces cosses est vraiment délicat
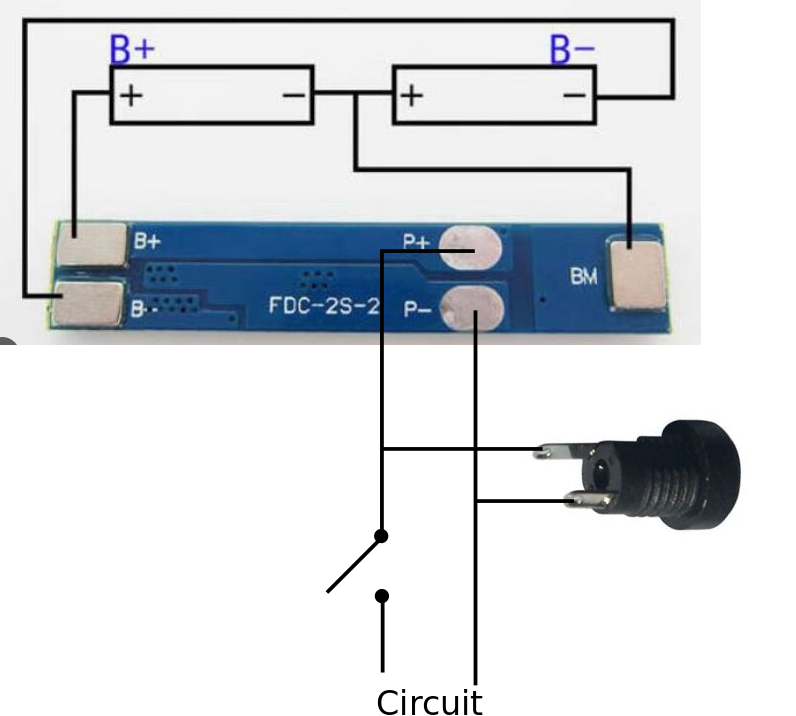
##### 6) câbler la batteries
Il faudra souder un câble sur le support de batteries pour avoir la tension milieu
Pour le connecteur charge, utiliser un multimètre en mode "bip bip" (où bipmètre pour les intimes) pour trouver sur quel borne mettre le + et le - . Le - doit être à l'extérieur du connecteur et le + à l'intérieur
[](https://wiki.robotronik.fr/uploads/images/gallery/2023-09/uA8image.png)