
Travail Prioritaire
Pour cette saison 2024 de la Coupe de France de robotique, nous ne connaissons pas encore le regèlent et nous ne le connaitrons pas avant septembre 2023. Il est donc important de se concentré pour l'instant sur du développement général.
Objectif Principal
La seule chose qui est plus ou moins sur pour l'année prochaines est le fait que nous devons disposer de 1 ou 2 bases roulantes fonctionnelles. Cela veut dire que :
- Elle doit être capable de se déplacer d'un points A à un points B de façons précise et rapide.
- Etre capable de détecter un adversaire pour pouvoir réaliser un déplacement
- Disposer d'un système d'alimentation et d'un bouton d'arrêt d'urgence
Tout doit être mis en place pour satisfaire ces points en priorité en s'appuyant sur technologie actuellement développé. Dans un second temps, des travaux de recherche pour l'amélioration peuvent être entrepris. Ces améliorations sont dans un deuxième livre.
Schémas électriques de du robot :
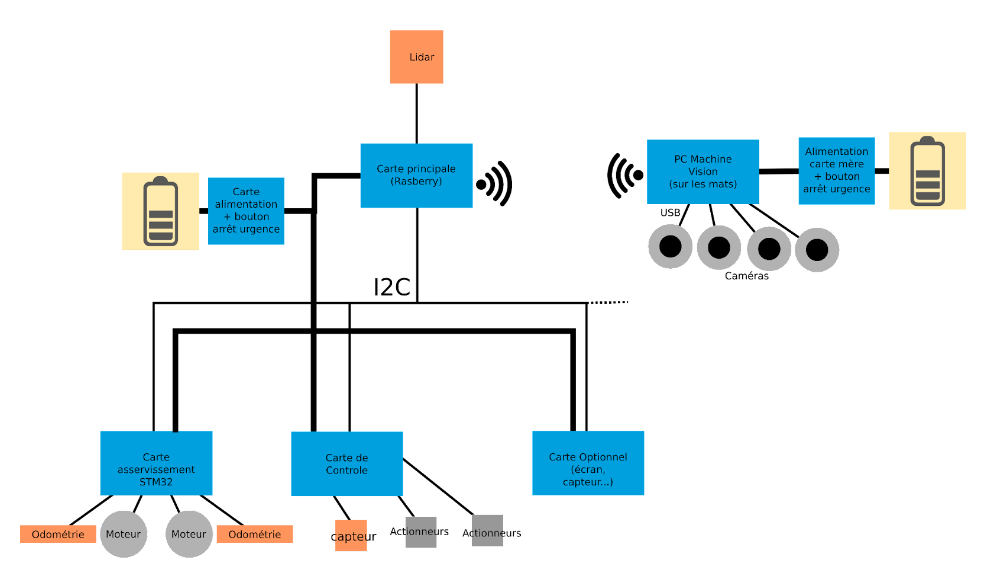
La partie machine vision ne va probablement pas être réalisé sauf si quelqu'un est très motivé. Le robot doit donc être capable de fonctionner sans (comme 95% des robot de la coupe de France. Cela ne pose pas vraiment problème de ne pas avoir de machine vision)
Mission principale
Réparer l'odométrie
La nouvelle odométrie développé possède du jeux. Il est donc important de trouver un solution ou de remonter l'ancienne.
Alimentation
L'alimentation avec des batteries d'outil électroportatif semble une bonne idée. Il faudrait donc développer un adaptateur permettant de fixer rapidement une batterie einhell au robot. Il faudrait que cette adapteur sois similaire a ce qui se trouve réellement sur les outils de la marque einhell.
exemple : https://www.printables.com/fr/model/98138-battery-adapter-einhell-power-x-change-general-pur
Asservissement
L'amélioration du code sur la carte d'asservissement serait nécessaire (le code de l'odométrie fonctionne bien cependant). L'objectif serait de rendre l'asservissement plus doux, plus précis et plus rapide. Il est important de garder un moyen simple de définir une vitesse maximum et une accélération maximum.
Il faudrait aussi gérer le freinage du robot pour que le freinage sois rapide et qu'il ne dévie pas de trajectoire.
Raspberry pi / Programme principal
Préparer le Raspberry-pi qui va servir d'ordinateur central. Il doit être capable de:
- booter rapidement (10 a 15 secondes)
- exécuter un programme avec un auto run au démarrage (de préférence en C)
- disposé d'une connexion ssh pour un debug facil
- Il serait bien d'avoir également un petit écrans toujours pour le debug
Pour le programme (en C) doit être capable :
- de récupérer les données du lidar
- communiquer en I2C
- Communiquer avec le wifi en TCP vers un autre ordi (machine vision, autre robot...)
Création d'une carte actionneur
Il faudrait trouver ou fabriquer un carte capable de contrôler une dizaine de servos moteurs et 2 à 3 moteur pas à pas. Cette carte resvrait une instruction par l'i2c comme "moteur pas à pas 2 avance de 200 pas" et cette carte ferait bouger le moteur. La carte possèderait éventuellement un/des buck converter et LDO pour fabriquer ces tensions.
Par rapport à l'ancien design, le but est de remplacer l'ensemble Shield + Arduino mega. Si possible, le dispositif doit être plus petit.
No Comments