
Correction
#include <stdio.h>#define ROWS 10#define COLS 10
void initGrille(char grille[ROWS][COLS], int robotX, int robotY) { for (int i = 0; i < ROWS; i++) for (int j = 0; j < COLS; j++) grille[i][j] = '.'; // Remplir la grille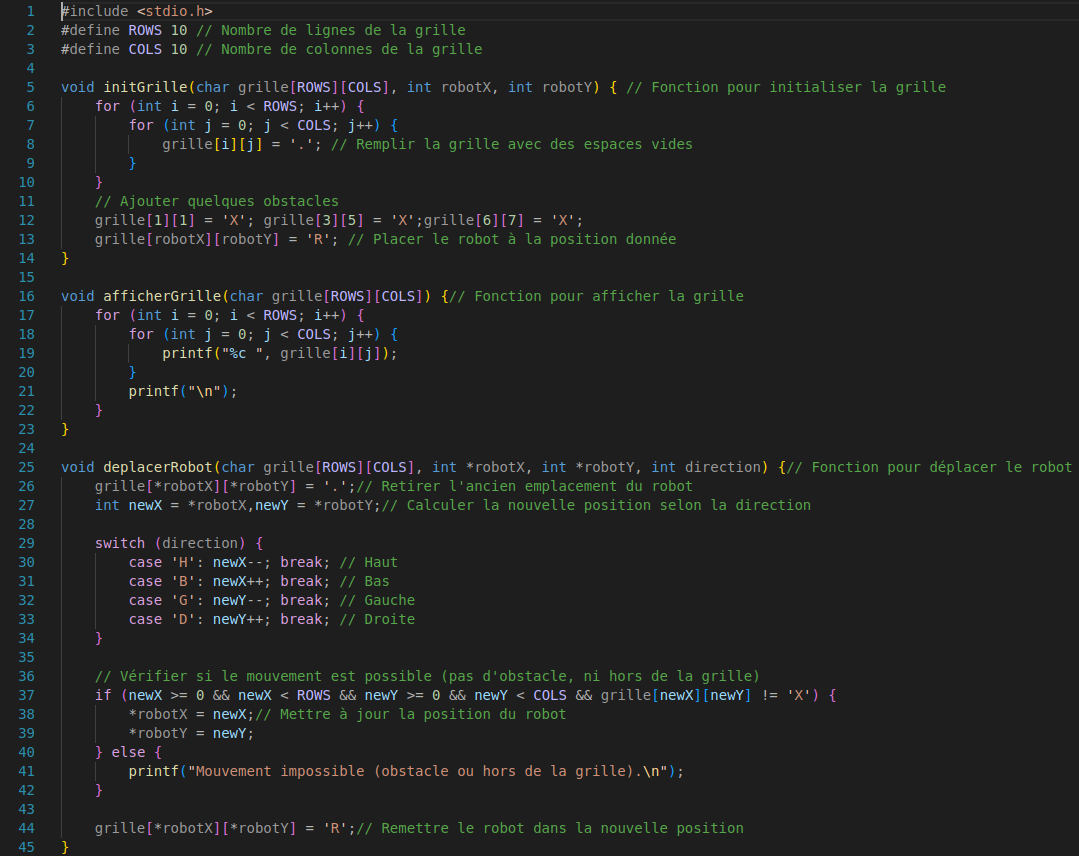
// Ajouter quelques obstacles grille[1][1] = 'X'; grille[3][5] = 'X'; grille[6][7] = 'X'; grille[robotX][robotY] = 'R'; // Placer le robot}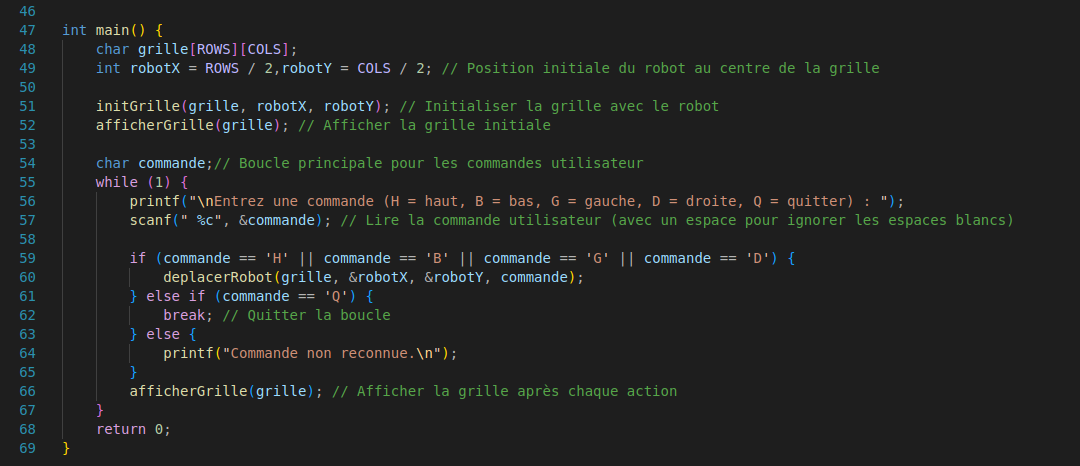
void afficherGrille(char grille[ROWS][COLS]) { for (int i = 0; i < ROWS; i++) { for (int j = 0; j < COLS; j++) printf("%c ", grille[i][j]); printf("\n"); }}
void deplacerRobot(char grille[ROWS][COLS], int *robotX, int *robotY, int direction) { grille[*robotX][*robotY] = '.'; // Retirer l'ancien emplacement int newX = *robotX, newY = *robotY;
switch (direction) { case 'H': newX--; break; // Haut case 'B': newX++; break; // Bas case 'G': newY--; break; // Gauche case 'D': newY++; break; // Droite }
// Vérifier le mouvement if (newX >= 0 && newX < ROWS && newY >= 0 && newY < COLS && grille[newX][newY] != 'X') { *robotX = newX; *robotY = newY; // Mettre à jour la position } else { printf("Mouvement impossible (obstacle ou hors de la grille).\n"); }
grille[*robotX][*robotY] = 'R'; // Remettre le robot}
int main() { char grille[ROWS][COLS]; int robotX = ROWS / 2, robotY = COLS / 2; // Position initiale
initGrille(grille, robotX, robotY); afficherGrille(grille);
char commande; while (1) { printf("\nEntrez une commande (H = haut, B = bas, G = gauche, D = droite, Q = quitter) : "); scanf(" %c", &commande);
if (commande == 'H' || commande == 'B' || commande == 'G' || commande == 'D') { deplacerRobot(grille, &robotX, &robotY, commande); } else if (commande == 'Q') { break; } else { printf("Commande non reconnue.\n"); } afficherGrille(grille); } return 0;}